Sciences de l'Ingénieur
Accueil
Chaine d'Information
Chaine de Puissance
SySML
Projet IT
Modélisation multiphysique
Accueil
Modélisation multiphysique
Modélisation multiphysique
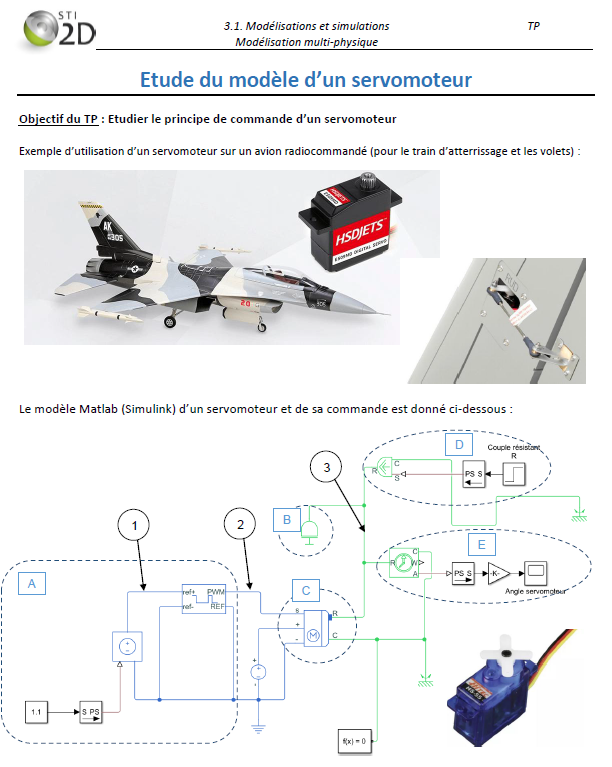
TP - Modélisation de la commande d'un servomoteur
(Matlab - Simulink)
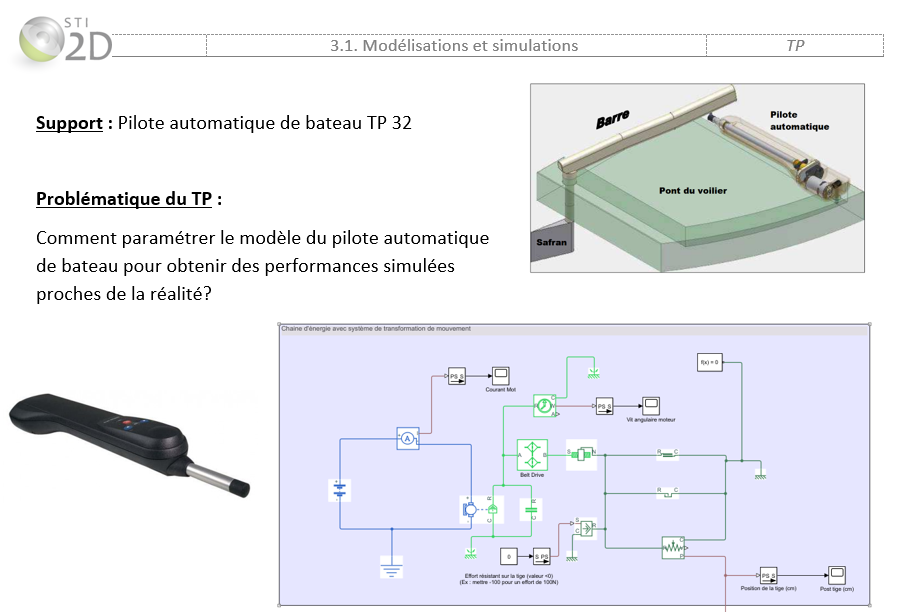
TP - Modélisation du pilote automatique de bateau TP32
(Matlab - Simulink)
Recherche
Ce site peut utiliser des cookies et des scripts externes.
Plus d'informations
Nécessaire
Paramètres
Statistiques
Marketing
Enregistrer les modifications
Réglages
Rejeter
Accepter tous les cookies
Accepter tous les cookies
Réglages
Rejeter